Basé sur la notice de la boîte 9 d'avant 1970, ce modèle fascine les enfants... ainsi que la plupart des
visiteurs !
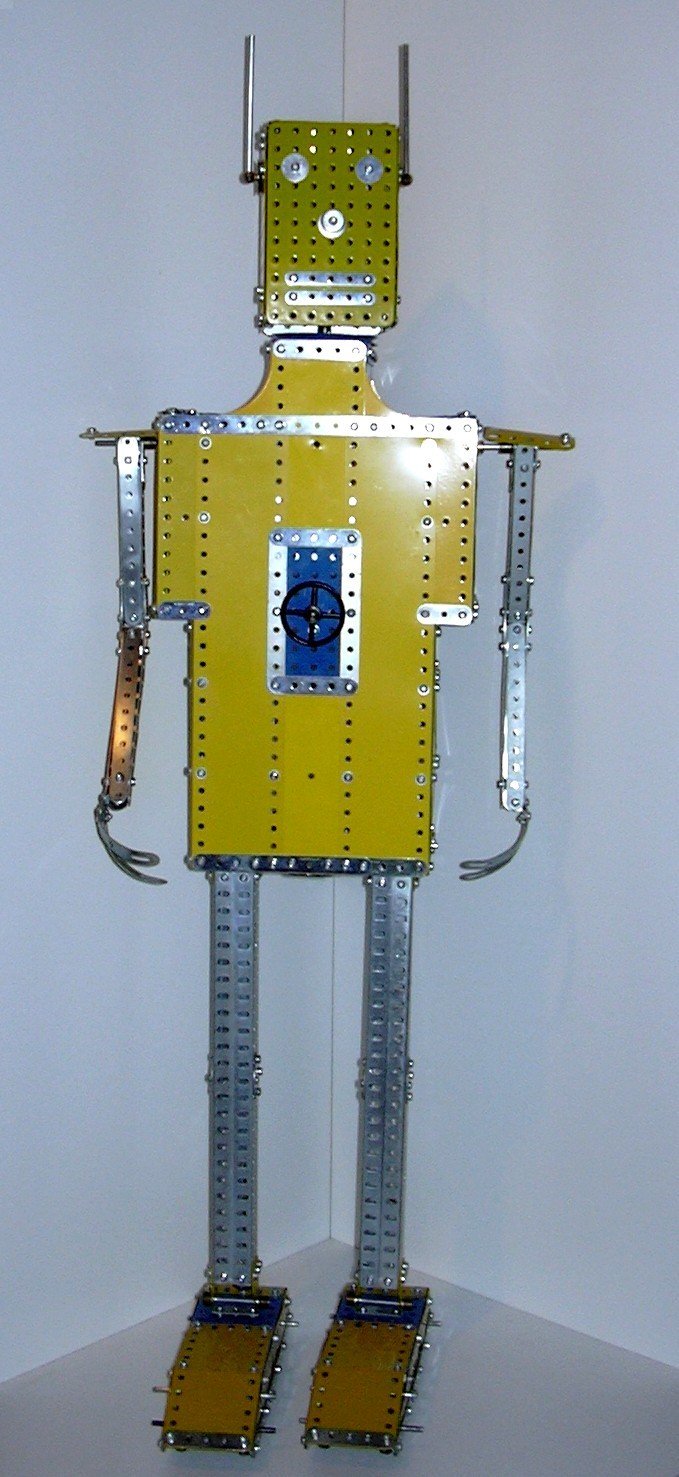
Haut d'un peu plus de 90 cm, il marche en balançant les bras et en tournant la tête en cadence.
J'ai respecté les instructions, excepté pour :
- les bras, afin de ne pas tordre de plaques et pour rester dans le style des jambes,
- les pieds, qui m'ont toujours donné l'impression d'être « à l'envers » dans le modèle,
- la motorisation.
From the pre-70 outfit 9 leaflets, this model fascinates children... and most visitors!
About 3 feet high, it walks, swings its arms, and rotates the head from left to right.
I followed the instructions, excepted for:
- the arms, to avoid bending plates and to have the same look as the legs,
- the feet, which I always found looking back to front in the leaflet picture,
- the drive.

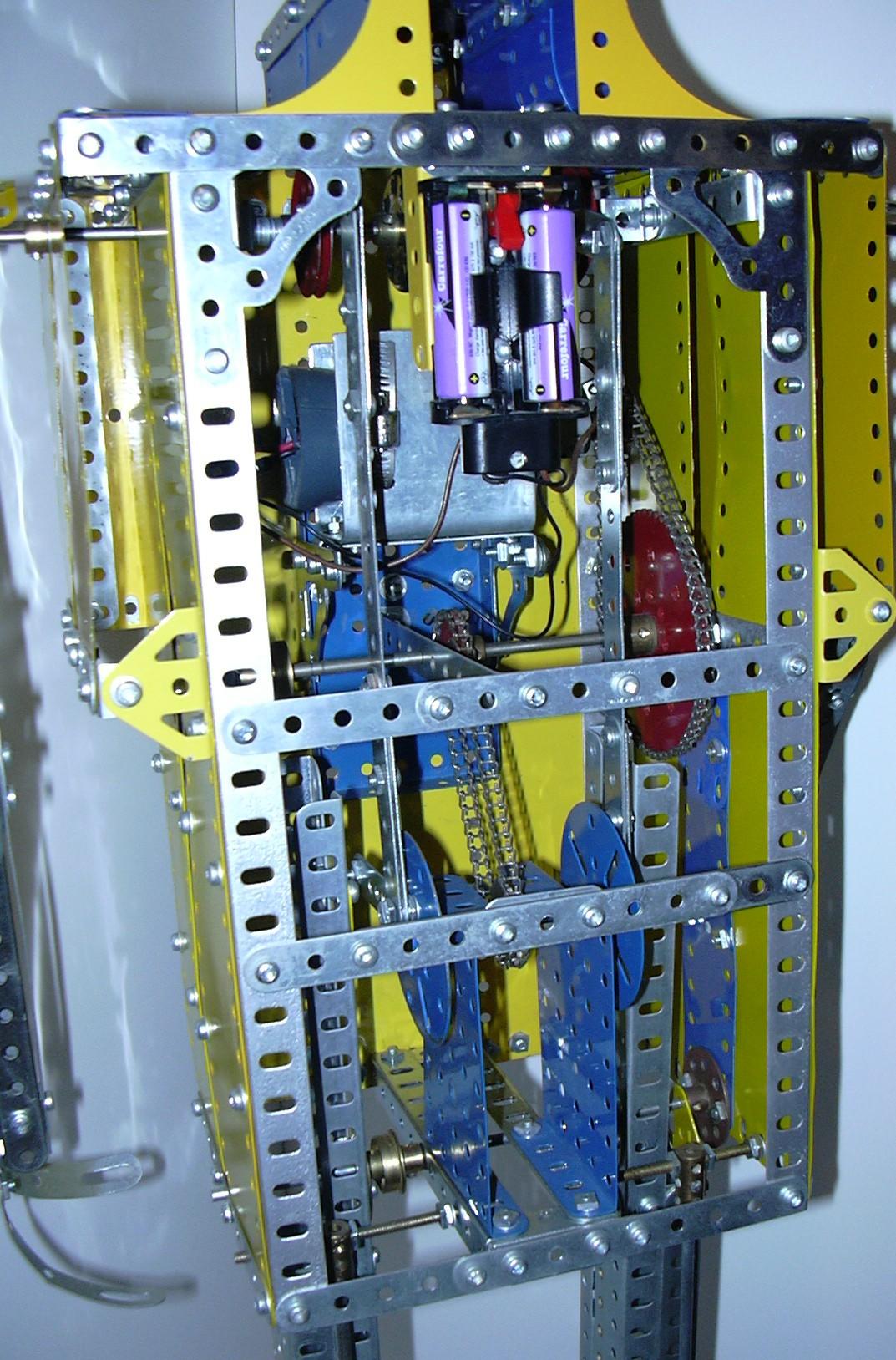
Un modèle assez facile à construire, et doté d'un mécanisme simple et élégant pour effectuer les différents mouvements. Je l'ai
doté d'un moteur bricolé à partir d'un tournevis électrique, fournissant beaucoup de couple à bas régime : il faut ça, et je me demande si ce
modèle a jamais fonctionné avec le moteur Meccano E15R et la faible réduction de la notice d'origine. En outre, j'ai du rajouter une bande coudée de 11 trous pour maintenir l'axe
central : tenu seulement par ses extrémités, il pliait et faisait sauter la chaîne montée sur la roue de 14 dents.
An easy-to-build model, with a simple but efficient mechanism driving each movement. The motor, adapted from a electric screwdriver, has a low speed and a very high torque --
but not too much for the model, and I'd like to know if it has ever worked with the Meccano E15R motor and the few reduction gearings of the original instructions. Because of the high torque, I had to add a 11
holes double angle strip to support the central axle rod : only supported by its ends, it was bending and the chain was "stepping" on the central 14 teeth sprocket.
Les pieds une fois modifiés.
Les accouplements sur les « tendons d'Achille » permettent de régler la posture du corps : tendons trop longs, le robot semble penché en avant, et trop courts,
l'équilibre est instable, et le robot chute en arrière !
The modified feet.
The couplings on the "sinew" allow to adjust the posture of the body: too long, and the robot appears to bend down, but too short, and it falls down on his back!